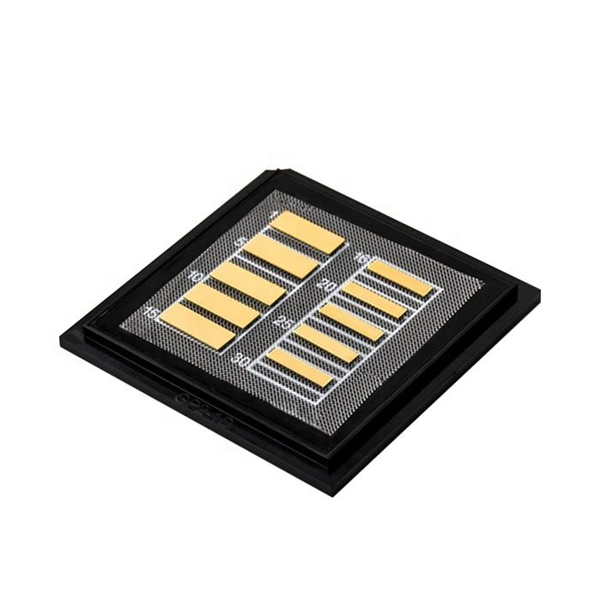
CMU researchers have developed a three-fingered soft robotic hand with fiber optics and a new stretchable optical sensor. Low-cost power efficient optoelectronic sensors manufactured from flexible materials represent a natural choice as they can cope with the large deformations of soft robots without loss of performance. The central portion—where most of the light travels—is called the core. Light is trapped inside the core and travels along the fiber by bouncing off the. Phase change of a light wave through an optical fiber of original length L that has been stretched by a length ? There is a trade-off between distance range and frequency bandwidth (due to time-of-flight limitations). How Does a Fiber Optic Hydrophone Work? panels mounted low two high frequency. Six FBGs with different wavelengths were arrayed along a single fiber and divided into three groups to measure Fx, Fy, and Fz, respectively. Keywords: Fiber Bragg grating (FBG); force. This paper pre-sents a method to implant temperature sensor network into soft robot finger by using optical fiber gratings. For im-planting the sensors firmly, a solution using.